MESS IS MORE
Mess is More challenges the idea of perception in architecture. While earlier devices such as film cameras and binoculars extend human sight, newer technologies such as drones and 3D scanners possess a unique vision that interprets imagery computationally. Since these machines are typically used to document architecture rather than generate it, our contemporary understanding of the built environment is always prefigured by its digital image.
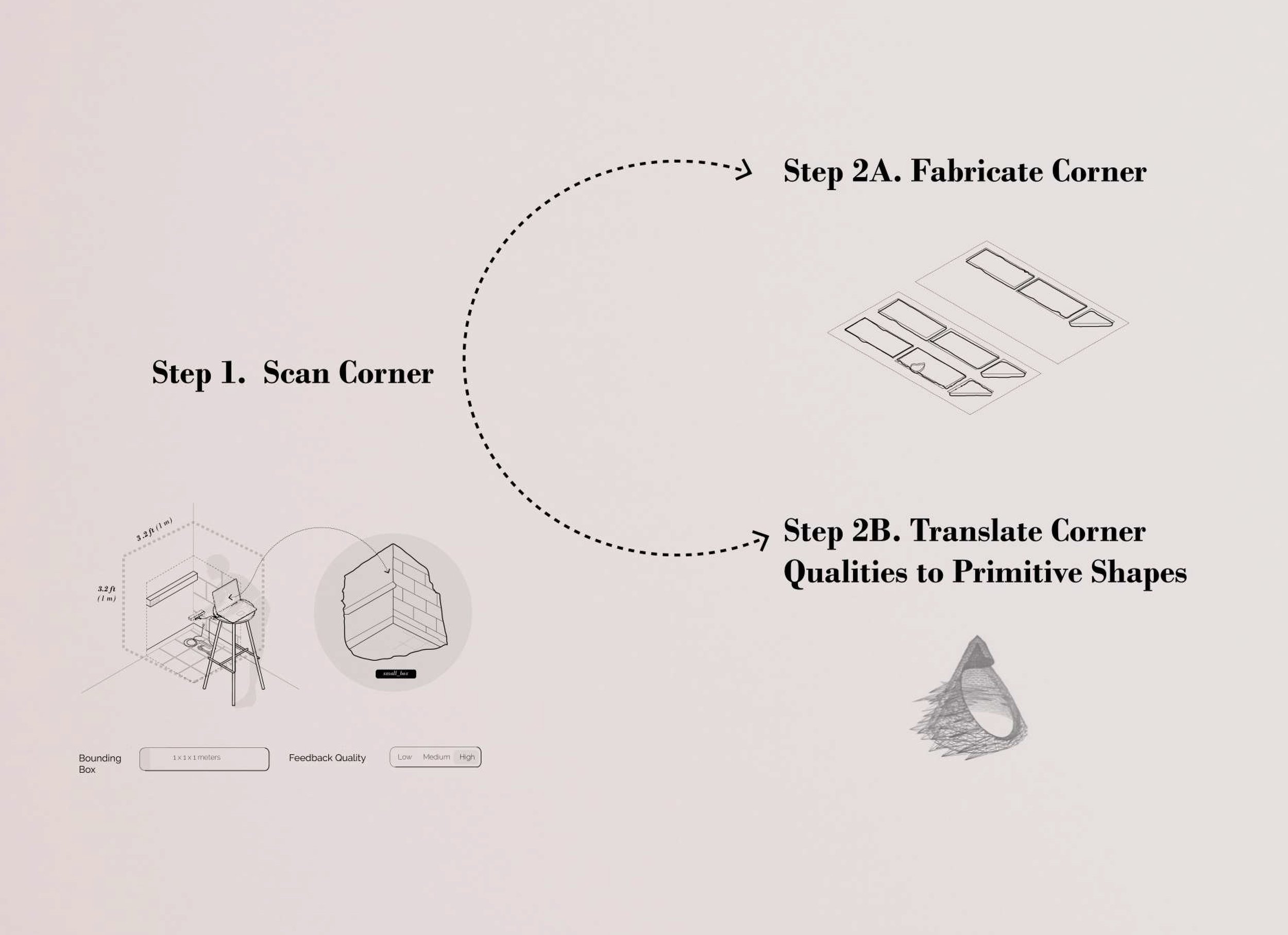
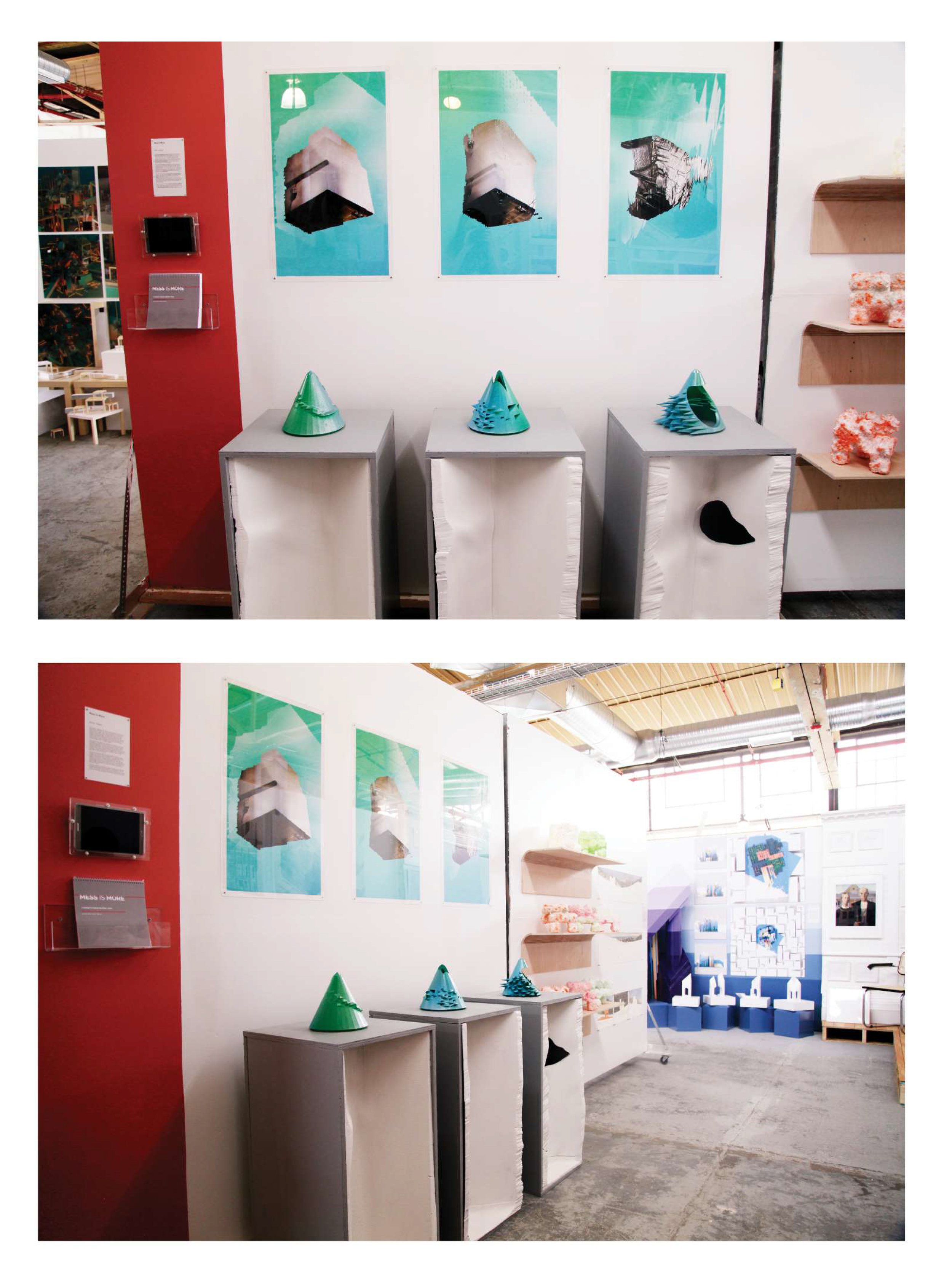
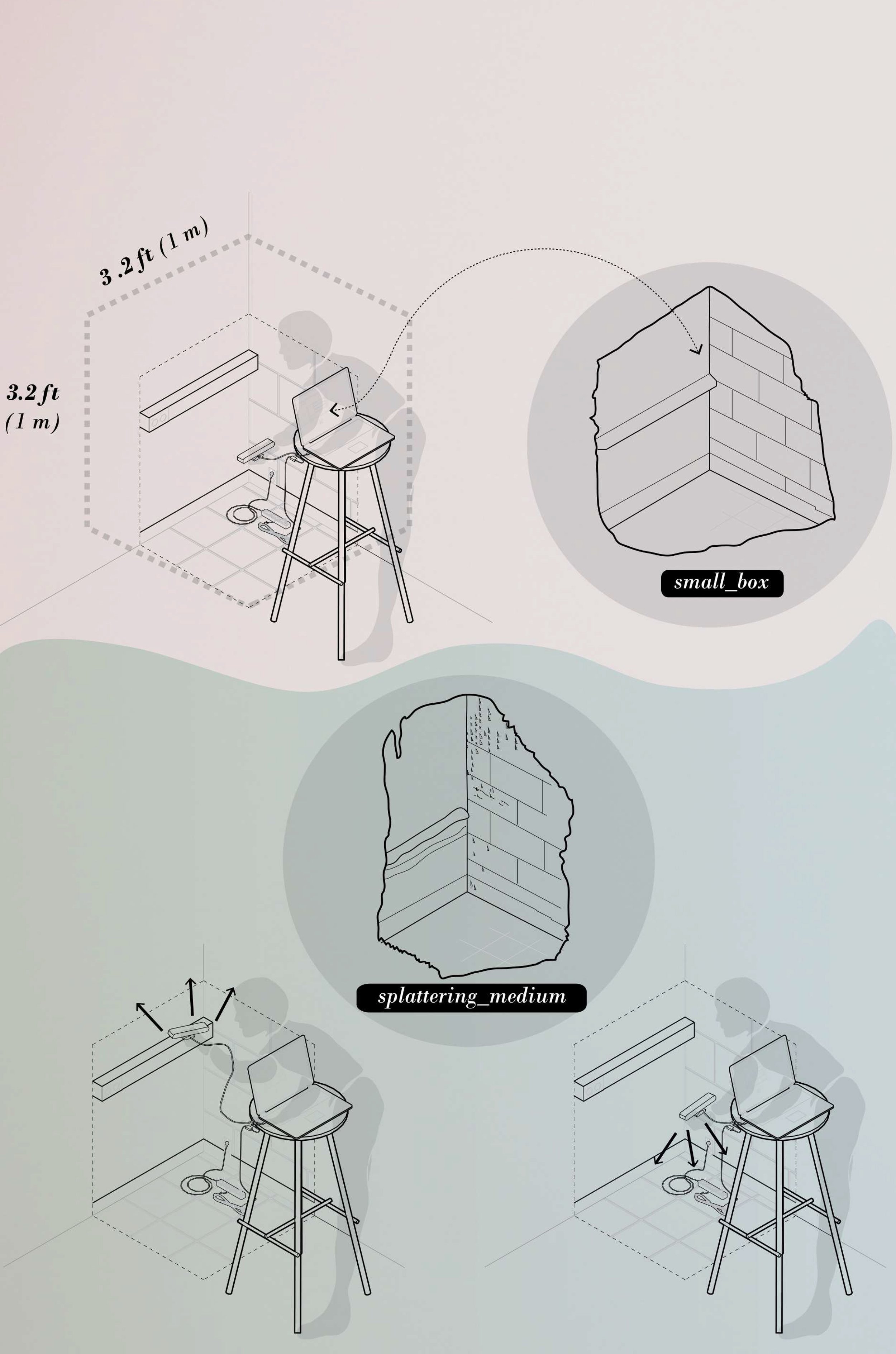
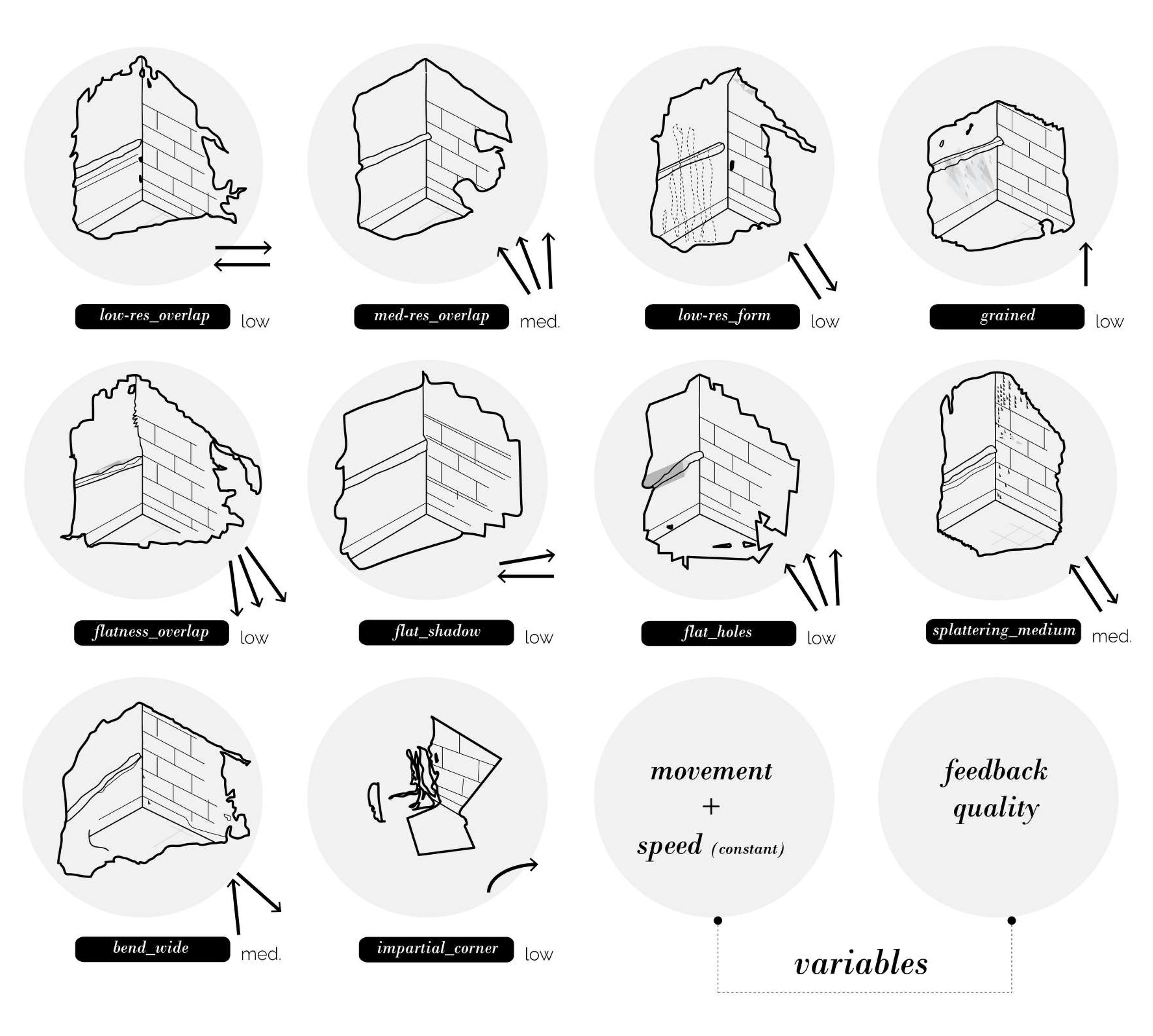
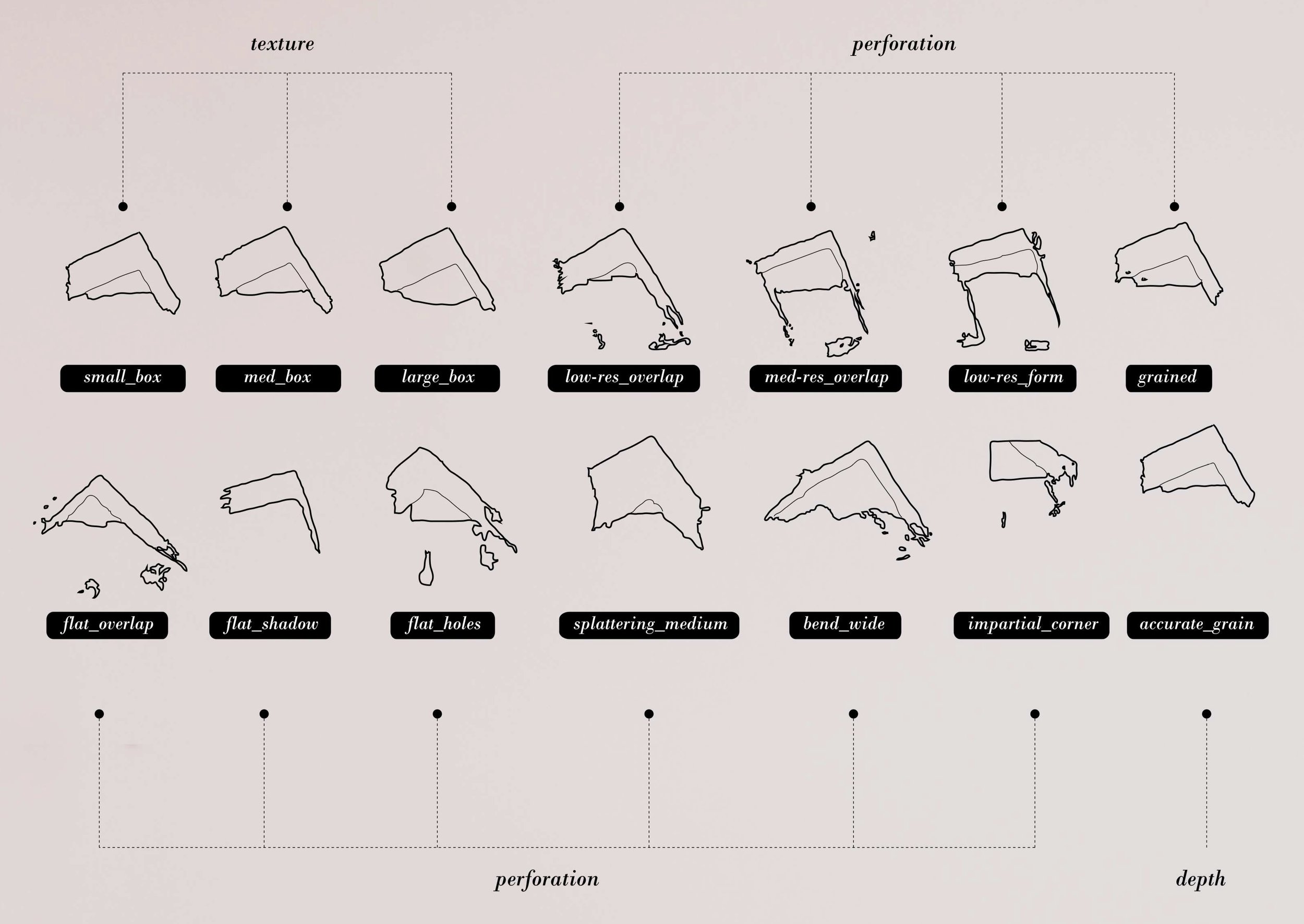
This project leverages this condition to propose a new way of seeing, one that combines machine and human vision by creating a feedback loop between digital translation and physical fabrication. The incongruence between these visions is depicted by imperfections in the digital scans and physical mockups. These controlled mistranslations offer a new approach to perceiving form.